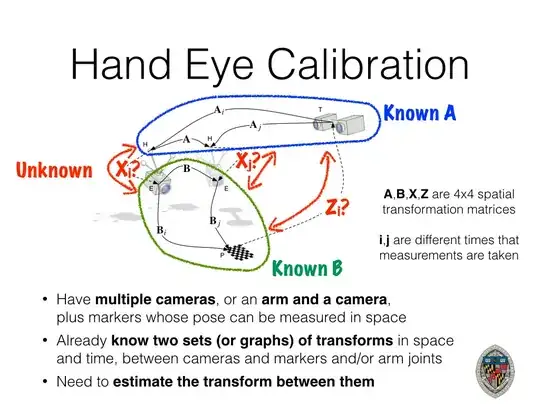
I'm trying to use a dual quaternion Hand Eye Calibration Algorithm Header and Implementation, and I'm getting values that are way off. I'm using a robot arm and an optical tracker, aka camera, plus a fiducial attached to the end effector. In my case the camera is not on the hand, but instead sitting off to the side looking at the arm.
The transforms I have are:
- Robot Base -> End Effector
- Optical Tracker Base -> Fiducial
The transform I need is:
- Fiducial -> End Effector

I'm moving the arm to a series of 36 points on a path (blue line), and near each point I'm taking a position (xyz) and orientation (angle axis with theta magnitude) of Camera->Fiducial and Base->EndEffector, and putting them in the vectors required by the HandEyeCalibration Algorithm. I also make sure to vary the orientation by about +-30 degrees or so in roll pitch yaw.
I then run estimateHandEyeScrew, and I get the following results, and as you can see the position is off by an order of magnitude.
[-0.0583, 0.0387, -0.0373] Real [-0.185, -0.404, -0.59] Estimated with HandEyeCalib
Here is the full transforms and debug output:
# INFO: Before refinement: H_12 =
-0.443021 -0.223478 -0.86821 0.321341
0.856051 -0.393099 -0.335633 0.470857
-0.266286 -0.891925 0.36546 2.07762
0 0 0 1
Ceres Solver Report: Iterations: 140, Initial cost: 2.128370e+03, Final cost: 6.715033e+00, Termination: FUNCTION_TOLERANCE.
# INFO: After refinement: H_12 =
0.896005 0.154992 -0.416117 -0.185496
-0.436281 0.13281 -0.889955 -0.404254
-0.0826716 0.978948 0.186618 -0.590227
0 0 0 1
expected RobotTipToFiducial (simulation only): 0.168 -0.861 0.481 -0.0583
expected RobotTipToFiducial (simulation only): 0.461 -0.362 -0.81 0.0387
expected RobotTipToFiducial (simulation only): 0.871 0.358 0.336 -0.0373
expected RobotTipToFiducial (simulation only): 0 0 0 1
estimated RobotTipToFiducial: 0.896 0.155 -0.416 -0.185
estimated RobotTipToFiducial: -0.436 0.133 -0.89 -0.404
estimated RobotTipToFiducial: -0.0827 0.979 0.187 -0.59
estimated RobotTipToFiducial: 0 0 0 1
Am I perhaps using it in the wrong way? Is there any advice you can give?