UPDATE
I was not thinking straight anymore and got totally confused after working hours on my equations. The point is, I have an unstable system, but I force it on the stable path. After realizing that crucial point everything made perfect sense.
Problem
(I fixed some major errors)
I'm having a two dimensional system with dynamics
\begin{align}
\dot{k} &= \frac{1}{1+\frac{1}{\rho}} - \frac{1}{1+\lambda}\\
\dot{\lambda} &= \rho\lambda - \frac{1}{k}.
\end{align}
Where $k\in[0,2]$ is the state, and $\lambda$ the costate. There is a (symmetric) fixed point $E(\tilde{k},\tilde{\lambda})$ at $\tilde{\lambda} = \frac{1}{k\rho}$ which yields $\tilde{k}=1$. The Jacobian at the fixed point is given by
\begin{align}
J_E = \begin{bmatrix}0,& \frac{1}{\left(\frac{1}{\rho}+1\right)^2}\\
1,& \rho\end{bmatrix}_E
\end{align}
I get two eigenvalues which are opposite in sign
\begin{align}
(\mu_1,\mu_2)=\left(\frac{p(p + \sqrt{p^2 + 2p + 5}+ 1}{2(p + 1)},\frac{p(p - \sqrt{p^2 + 2p + 5}+ 1}{2(p + 1)}\right)
\end{align}
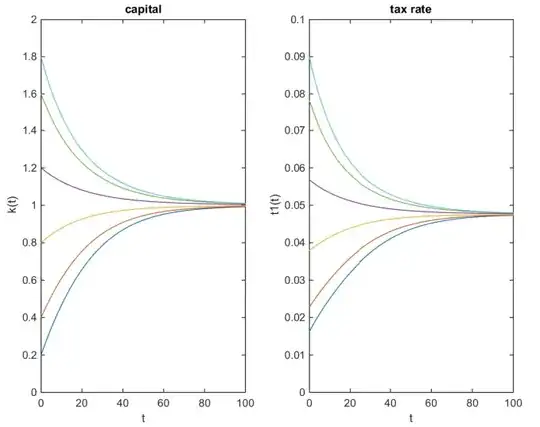
where $\rho\in\mathbb{R}_{++}$ (time preference rate). The first eigenvalue is always positive ($\mu_1>0$) and the second one is always negative ($\mu_2<0$). So it is an unstable saddle,right? Nonetheless the system is stable. How is that possible, cause I used to think that it must be unstable? The image shows the evolution of the state and the control which is a function of the costate. ($\rho = 0.05$)
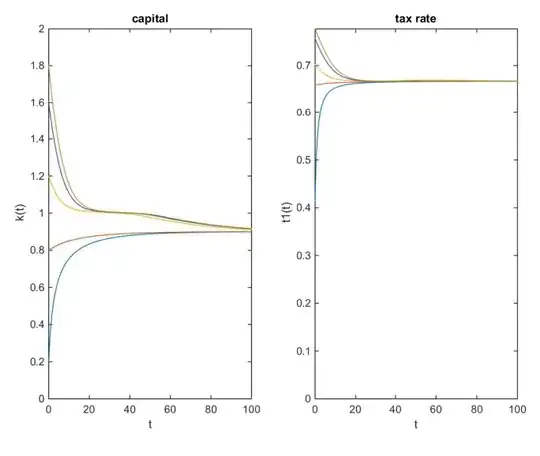
For reference I add figures with $\rho=2,5$. The first one seems to converge to a different fixed point $k<1$ (I didn't solve for that one, cause I deal with a symmetric situation; I think there are three in total).
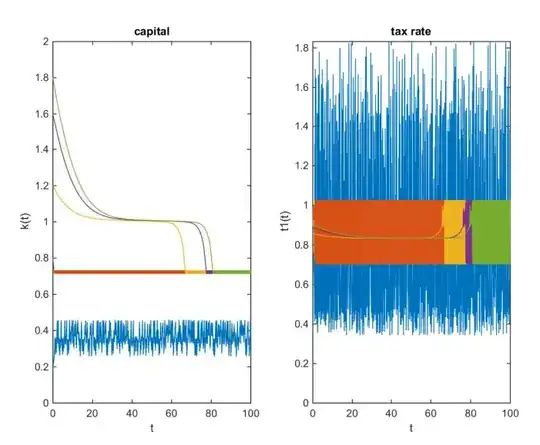
And the second picture shows a strange attractor? Which I actually quite like cause of its chaotic stability. For $k\in[0,3]$ the policy function $\tau_1(k)$ is quite weird.
A guess: You are in a discrete time model, not a continuous one. The stability criterion for discrete time is that the absolute value of the eigenvalues are smaller than one. See http://en.wikipedia.org/wiki/Lyapunov_stability#Stability_for_linear_state_space_models
– Giskard Apr 19 '15 at 09:58